Według NASA robot działa poprzez emulację fizycznych cech ludzi, takich jak budowa ciała, układ mięśni, system sensoryczny, źródło zasilania i system mózgowy. Większość robotów jest programowalna, co oznacza, że ich zachowanie można zmienić, pisząc nowy program na swoim komputerze.
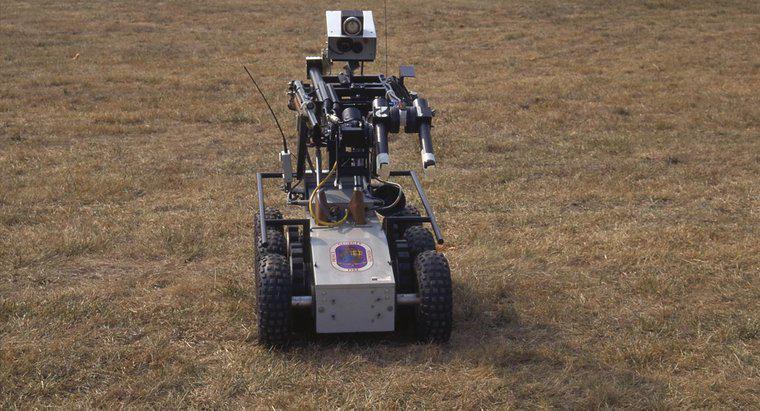
Chociaż projekty robotów różnią się, jedną rzeczą, którą mają ze sobą wspólnego, jest ruchome ciało. Roboty poruszają się za pomocą napędzanych kół lub dziesiątek ruchomych segmentów wykonanych z tworzywa sztucznego lub metalu. Poszczególne segmenty są podobne do kości w ciele, ponieważ są również połączone ze stawami na głównym ciele robota. Siłowniki, takie jak silniki elektryczne i solenoidy, służą do obracania kół i obracania połączonych segmentów. Niektóre roboty wykorzystują również układ hydrauliczny lub pneumatyczny zasilany baterią lub gniazdami elektrycznymi w ścianie. Chociaż niektóre roboty mają systemy sensoryczne, większość nie jest w stanie widzieć, słyszeć, wąchać ani smakować. Jednak roboty mają poczucie ruchu, które daje im możliwość monitorowania własnego ruchu. Roboty mogą również naśladować określone części ciała, takie jak ramiona robotyczne używane przez NASA do przemieszczania dużych obiektów w przestrzeni. Są również używane jako statki kosmiczne, które eksplorują inne światy lub są bezzałogowymi statkami powietrznymi.