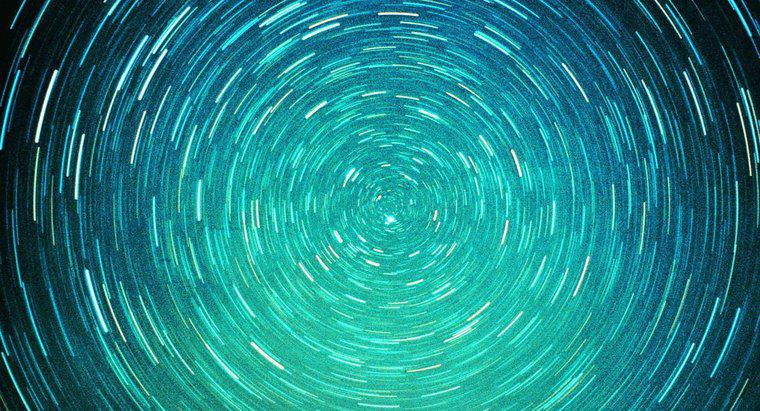
Do lepiej znanych form ruchu zalicza się ruch obrotowy (obracając się w kółko), ruch liniowy (ruch w linii prostej), ruch posuwisto-zwrotny (ruch w tył i przód w linii prostej), ruch oscylacyjny (kołysanie z boku na bok), ruch nieregularny (ruch bez wyraźnego wzoru) i ruch jednostajny (poruszanie się ze stałą prędkością w linii prostej). Kinematyka to nauka badająca ruch obiektów.
Ruch jest ruchem i można go również zdefiniować jako ciągłą zmianę położenia obiektu wzdłuż określonego wektora. Każdy rodzaj ruchu jest kontrolowany przez inny rodzaj siły.
Istnieją dwa typy podstawowego ruchu. Translacja oznacza ruch wzdłuż ścieżki i jest definiowana przez siłę netto (suma różnych sił) działającą na obiekt, podczas gdy obrót oznacza ruch wokół stałej osi i jest definiowany przez moment obrotowy (siła, która powoduje obrót obiektu). /p>
Wiele mechanizmów przyjmuje jeden typ ruchu wejściowego i wyprowadza go jako inny typ ruchu. Na przykład łańcuch i koło łańcuchowe zmienia ruch obrotowy na ruch liniowy. Krzywka i popychacz zmieniają ruch obrotowy w ruch posuwisto-zwrotny, a kołek i szczelina zmieniają ruch oscylacyjny w ruch obrotowy.